this blog is made to explain in the best form the numerical methods course;i want with it,study and learn with other people about the course.
this blog will be a very helpful to other people that have some problems, questions,and comments maybe, for the course.
i hope that the blog can answer some questions for students,and they can help me with their comments !!
In computational mathematics, is an iterative method to solve a problem (as an equation or a system of equations) by successive approximations to the solution, starting from an initial estimate. This approach contrasts with the direct methods, which attempt to solve the problem once (like solving a system of equations Ax = b by finding the inverse of the matrix A). Iterative methods are useful for solving problems involving a large number of variables (sometimes in the millions), where direct methods would be prohibitively expensive even with the best available computer power.
In numerical analysis method of Jacobi is an iterative method, used for solving systems of linear equations Ax = b. Type The algorithm is named after the German mathematician Carl Gustav Jakob Jacobi
The basis of the method is to construct a convergent sequence defined iteratively. The limit of this sequence is precisely the solution of the system. For practical purposes if the algorithm stops after a finite number of steps leads to an approximation of the value of x in the solution of the system.
The sequence is constructed by decomposing the system matrix as follows:
where
D is a diagonal matrix. L is a lower triangular matrix. U is an upper triangular matrix
From Ax = b, we can rewrite this equation as:
then:
If aii ≠ 0 for each i. For the iterative rule, the definition of the Jacobi method can be expressed as:
where k is the iteration counter, finally we have:
Note that when calculating xi ^ (k +1) requires all elements in x ^ (k), except the one with the same i. Therefore, unlike in the Gauss-Seidel method, you can not overwrite xi ^ (k) with xi ^ (k +1), since its value will be for the remainder of the calculations. This is the most significant difference between the methods of Jacobi and Gauss-Seidel. The minimum amount of storage is of two vectors of dimension n, and will need to make an explicit copy
Gauss-Seidel Method
The Gauss-Seidel is an iterative method for solving systems of linear equations. His name is a tribute to the German mathematicians Carl Friedrich Gauss and Philipp Ludwig von Seidel. It is similar to the method of Jacobi (and as such, follows the same convergence criteria). Convergence is a sufficient condition that the matrix is strictly diagonal dominant, i. y., is guaranteed the convergence of the sequence of values generated for the exact solution of linear system.
We seek the solution of the set of linear equations, expressed in terms of matrix as
The Gauss-Seidel iteration is:
where A = D + L + U, the matrix D, L, and U represent respectively the coefficient matrix A: the diagonal, strictly lower triangular and strictly upper triangular, and k is the counter iteraction. This matrix expression is mainly used to analyze the method. When implemented, Gauss-Seidel, an explicit approach is used entry by entry:
Differentiating, if the method of Gauss-Jacob
Since the Gauss-Seidel method has faster convergence than the latter.
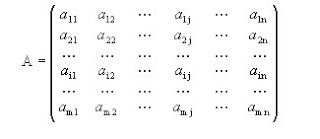
The matrices are used to describe systems of linear equations, keep track of the coefficients of a linear and record data that depend on various parameters. Arrays are described in the field of matrix theory. Can add, multiply and decompose in various ways, which also makes a key concept in the field of linear algebra.
When an array element is in the ith row and jth column is called the element i, jo (i, j)-ith the array. Put back first rows and then columns.
Briefly usually expressed as A = (aij) with i = 1, 2, ..., m, j = 1, 2, ..., n. The subscripts indicate the element's position within the array, the first denotes the row (i) and the second column (j). For example the element a25 is the element in row 2 and column 5.
TO resolve these matrices,there are some methods to do :
1. Replace Ri by ari where a is a nonzero number (in words: multiply or divide a row by a nonzero number). 2. Replace Ri by ari ± BRJ where a is a nonzero number (replacing a row by a linear combination with another line). 3. Swap two rows
By using these three operations, we can set any matrix in reduced form. A matrix is reduced, or reduced row echelon form if:
P1. The first nonzero element in each row (called the highlight of that line) is 1. P2. The columns of the highlights are cleared (ie, contain zero in every position above and below the central element.) The process of clearing a column by use of row operations is called swinging. P3. The important element in each row is on the right of the highlight of the previous row and the rows of zero (if any) are at the bottom of the array. The procedure to reduce a matrix to reduced echelon form is also called Gauss-Jordan reduction.
ELIMINACION GAUSSIANA
The Gaussian elimination method for solving systems of linear equations is to make basic operations through calls row operations into an equivalent system whose response easier to read directly. The Gaussian elimination method is the same for systems of equations 2 × 2, 3 × 3, 4 × 4 and so long as they respect the relationship of at least one equation for each variable.
Before illustrating the method with an example, we must first know the basic operations of line which are presented below:
1. Both members of an equation can be multiplied by a constant different from zero.
2. Nonzero multiples of an equation can join another equation
3. The order of the equations is interchangeable.
Once the operations known in my quest to solve
LU factorization
In linear algebra, factorization or decomposition LU (Lower-Upper English) is a form of a matrix factorization as the product of a lower triangular matrix and an upper. Due to instability of this method, for example if an element of the diagonal is zero, it is necessary premultiply matrix by a permutation matrix. Method called factorization PA = LU LU pivot.
This decomposition is used in numerical analysis to solve systems of equations (more efficiently) or find the inverse matrices.
It applies if the system has as many equations as unknowns n = m and the determinant of the coefficient matrix is nonzero. That is, a Cramer system is, by definition, compatible determined and, therefore, always has a unique solution.
The unknown value of each xi is obtained from a ratio whose denominator is the determinate of the coefficient matrix, whose numerator is the determinant obtained by changing the column i of the determinant above the column of independent terms.
here, there are some information about linear equations, if you can't see the information, please press the bottom "zoom", and you could see as you like, i hope that it will be good for you xD
In mathemathics, a system of linear equations (or linear system) is a collection of linear ecuations involving the same set of variables For example,
is a system of three equations in the three variables . A solution to a linear system is an assignment of numbers to the variables such that all the equations are simultaneously satisfied. A solution to the system above is given by
since it makes all three equations valid
In mathematics, the theory of linear systems is a branch of linear algebra, a subject which is fundamental to modern mathematics. Computational algorithms for finding the solutions are an important part of numerical linear algebra, and such methods play a prominent role in ,physics, chemistry, computer ciencie and economics. A system of non-linear equations can often be aproximated by a linear system (see linearization), a helpful technique when making a mathematical model or computer simulation of a relatively complex system.
The purpose of calculating the roots of an equation to determine the values of x for which holds: f (x) = 0
The determination of the roots of an equation is one of the oldest problems in mathematics and there have been many efforts in this regard.
Its importance is that if we can determine the roots of an equation we can also determine the maximum and minimum eigenvalues of matrices, solving systems of linear differential equations, etc ... The determination of the solutions of equation can be a very difficult problem.
if f (x) is a polynomial function of grade 1 or 2, know simple expressions that allow us to determine its roots. For polynomials of degree 3 or 4 is necessary to use complex and laborious methods. However, if f (x) is of degree greater than four is either not polynomial, there is no formula known to help identify the zeros of the equation (except in very special cases).
There are a number of rules that can help determine the roots of an equation: Bolzano's theorem, which states that if a continuous function, f (x) takes on the ends of the interval [a, b] values of opposite sign, then the function accepts at least one root in that interval. In the case where f (x) is an algebraic function (polynomial) of degree n real coefficients, we can say that will have n real roots or complex.
The most important property to verify the rational roots of an algebraic equation states that if p / q is a rational root of the equation with integer coefficient
Example: We intend to calculate the rational roots of the equation
3x3 + 3x2 - x - 1 = 0
First, you make a change of variable x = y / 3:
and then multiply by 32:
y3 + 3y2-3y = -9
0with candidates as a result of the polynomial are:
Substituting into the equation, we obtain that the only real root is y = -3,
(Which is also the only rational root of the equation). Logically, this method is very powerful, so we can serve only as guidelines.
Most of the methods used to calculate the roots of an equation are iterative and are based on models of successive approximations. These methods work as follows: from a first approximation to the value of the root, we determine a better approximation by applying a particular rule of calculation and so on until it is determined the value of the root with the desired degree of approximation.
GRAPHIC METHOD This method is used primarily to locate an interval where the function any root. Example 1 Locate an interval where the function f (x) = e ^ (- x) - ln x has a root.
Solution To calculate the root of f (x) do f (x) = 0, where e ^ (- x) = ln x. Therefore, the problem is finding the intersection point of the functions g (x) = e ^ (- x) and h (x) = ln x. We know these graphs:
From which, we conclude that an interval where the only root is [1,1.5]. In fact, we are not interested in being the finest in the search interval as then apply systematic methods to approximate better root. Let's say that the usefulness of the graphic method is in providing a range with which we start work
It is considered that significant numbers are those numbers that have real meaning or provide any information. The figures are not significant as a result of the calculations and have no meaning. The significant figures of a number are determined by its error. Significant figures are those that occupy a position equal to or above the order or position of the error.
When expressed a number should be avoided if the use of significant figures, becouse it can be a source of confusion. The numbers should be rounded so that contain only significant figures. It's called rounding to the process of eliminating non-significant digits of a number.The rule to be used in the rounding of numbers are: • If the figure is ignored is less than 5, is eliminated without more.• If the figure is greater than 5 eliminated, it increases by one unit the last digit retained.• When the digit removed is 5, last figure is taken as the nearest even number, ie if the figure is even left on hold, and if it is odd, take the higher figure.
Accuracy and Precision. Accuracy refers to how close it is measured or calculated value of the true value. Accuracy refers to how close an individual value is measured or calculated with respect to the others.The inaccuracy is defined as a systematic departure from the truth. Imprecision, on the other hand, refers to the magnitude of the spread of values.The numerical methods should be sufficiently accurate or no bias to meet the requirements of a particular engineering problem.
Error.
In general, for any error, the relationship between the exact number and obtained by approximation is defined as: Error = Actual value-estimated value Sometimes they know exactly the value of the error, denoted as Ev, or we estimate an approximate error. Now, to define the magnitude of error, or incidence on calculating the error detected, we can normalize its value: Ea = relative error (fraction) estimated error = true value I Since the value of Ea can be either positive or negative, in many cases we want to know more the magnitude of the error, in which case we will use the absolute value of this. An interesting case is an investigation conducted by Scarborough, which determined the number of significant figures contained in the error as:
If we replace it in Eq. We will get the number of significant figures is the approximate value obtained reliable. Thus, if our calculation has an error less than the criterion for two significant figures, we get numbers that correspond to a minimum:
Es = (0.5x 102-2)% = 0.5%
This will help us determine how many terms are needed on a rough estimate to make sure that the error is under the margin is specified in ROUNDING ERROR Many times, computers cut decimal numbers between e17 and 12th decimal thus introducing a rounding error For example, the value of "e" is known as 2.718281828 ... to infinity. If we cut the number 2.71828182 (8 significant digits after the decimal point) we are obtaining or failure E = -2.71828182 2.718281828 = 0.000000008 ...
However, as we do not consider the number that was cut was greater than 5, then we should have let the number as 2.71828183, in which case the error would only E = 2.118281828 = -0.000000002 -2.11828183 .. , Which in absolute terms is much smaller than the last. In general, the cutting error of the computers will be much lower than the error introduced by a user, usually cut to a smaller number of significant figures. Depending on the magnitude of the numbers with which you work, the rounding error can have a big impact very small in the final calculation.
For example, if we have a product of 502.23 m and a dollar price of U.S. $ 7.52, the total price of U.S. $ 3,776.7696 give us (in Chilean pesos to $ 1 = $ 500 gives us $ 1,888,384 , 8). Now, if we introduce a variation of 0.1% in meters of the product and calculate the total, we get 502.23 * 0.1% = 507, 54, in U.S. $ equivalent of U.S. $ 3,816.7008 (ie, $ 1,908,350.4 Chilean pesos, a difference of $ 19,965.6), which is no less important as a variation of 0.1% in the footage gives a product greater than 1.5% error in the final price Truncation error.
Truncation errors are related to the method of approach to be used because they generally face an infinite series of terms, will tend to cut the number of terms, introducing an error at that time, not to use the full set (which supposed to be exact). In one iteration, is understood as the error by not following iteration and continue moving towards the solution. In an interval that is subdivided for a series of calculations on it, is associated with crossing number result of dividing the interval "n" times.
TOTAL NUMBER ERROR
The total numerical error is defined as the sum of the rounding and truncation errors introduced in the calculation. But here comes a big problem. The more calculations would be carried out to obtain a result, the rounding error will be increased. But on the other hand, the truncation error can be minimized by including more terms in the equation, reduce or continue the iteration step (ie larger number of calculations and probably biggest mistake of rounding.) So what criteria do we use? ... The ideal would be to determine the point where errors begin to hide the advantage of considering a lower truncation error. But as I said, is ideal, in practice we must consider that computers today have a significant handling much larger numbers than before so the rounding error is minimized greatly, but should not be allowed to forget his contribution to the error total.
Darcy's law is a general expression to describe the fluid flow go through a porous medium. this equation is the mathematical model describing this phenomenon:
shows that the volumetric flow go through a porous medium, is a function of cross-sectional area of the elevation and the pressure of the fluid.
A mathematical model is a description of a system using mathematical language. The process of developing a mathematical model is termed mathematical modelling (also written modeling). Mathematical models are used not only in the natural sciences (such as physics, biology, earth science, meteorology) and engineering disciplines, but also in the social sciences (such as economics, psychology, sociology and political science); physicists, engineers, statisticians, operations research analysts and economists use mathematical models most extensively.



























{kind=link}
{kind=link}